
The Michigan Scientific Колісний імпульсний перетворювач високої роздільної здатності (WPT) — це оптичний кодер, який кріпиться до гайок колеса транспортного засобу. WPT зазвичай використовується для відстеження положення та швидкості транспортного засобу для таких додатків, як керування автопарком та автономне відстеження транспортних засобів. Цей приклад продемонструє точність використання двох колісних імпульсних перетворювачів разом, порівнявши вимірювання положення та швидкості з даними GPS.
Як це працює
Сигнал від кодера використовується для обчислення кутового положення та швидкості колеса. Дані, записані двома WPT з обох боків автомобіля, можна усереднювати, щоб знайти центр, таким чином даючи найточніше уявлення про відстань та швидкість, яку проїхав автомобіль. Картографічні транспортні засоби часто використовують WPT для компенсації розривів сигналу GPS, що дозволяє відстежувати відстань, пройдену під час втрати сигналу. У цьому дослідженні висока роздільна здатність даних WPT працювала набагато краще, ніж у датчика GPS, який використовувався через високу частоту дискретизації 10,000 XNUMX Гц.
Тестова установка
Щоб порівняти результати Wheel Pulse Transducer з результатами GPS, дві системи WPT були прикріплені до транспортного засобу, одна на задній правій стороні та одна на задній лівій стороні. Перетворювачі були зібрані на задніх колесах, так що обертовий рух передніх коліс не потрібно було компенсувати в даних. GPS-пристрій був розміщений на верхній частині автомобіля, в центрі даху над задніми колесами, де він давав найточніші показання. Відстань і швидкість ліворуч і праворуч WPT були усереднені, щоб відповідати сигналу GPS в центрі автомобіля. Показаний нижче курс довжиною в милю разом із графіком широти та довготи GPS включає обхід і зигзагоподібний маневр.
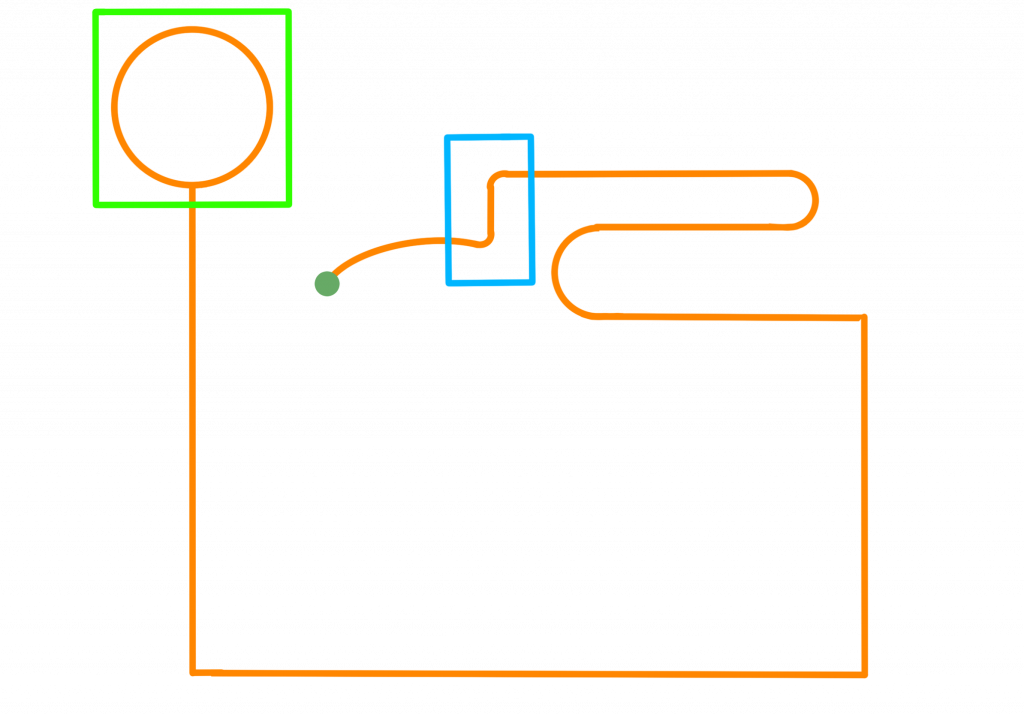
Схема тестової доріжки
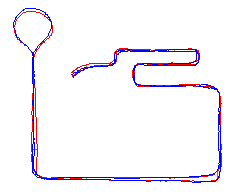
Дані GPS з тестової доріжки
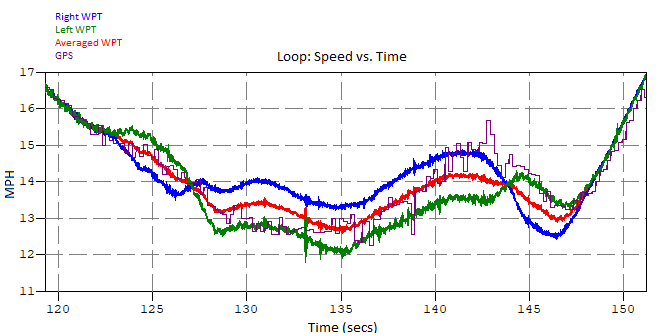
Петля
Якщо рухатися проти годинникової стрілки навколо кругової частини тестової доріжки (показано зеленим вище), можна було б очікувати, що швидкість і відстань правого колеса будуть набагато вище, ніж лівого. Дивлячись на дані, наведені нижче, виявляється, що це правда. Швидкості правого (синій) і лівого (зеленого) колеса усереднені (червоний) і майже ідеально збігаються з даними GPS (фіолетовий).
Зигзагоподібний шлях
Область, що містить швидкий поворот праворуч і ліворуч, показана в синьому квадраті на контурі тестової траси, забезпечує ще одну цікаву перспективу. Для графіка швидкості нижче, транспортним засобом маневрували швидким поворотом ліворуч, а потім відразу праворуч. Форма «W», створена цим, показує, що ліве колесо (фіолетове) рухалося повільніше, ніж праве (зелене) навколо лівого повороту, потім ліве йшло швидше, ніж праве навколо правого повороту. У той час як дві протилежні сторони міняються місцями протягом маневру, обчислене середнє значення (червоний) і дані GPS (сині) залишаються близько один до одного в середині.
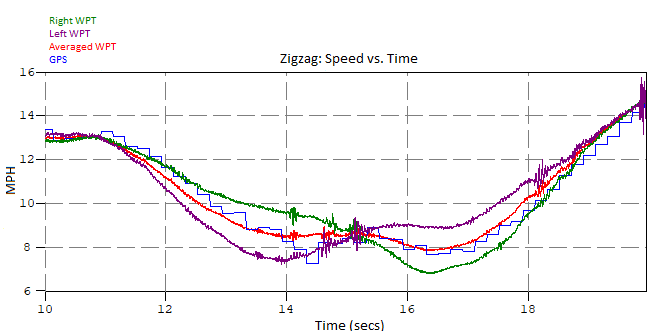
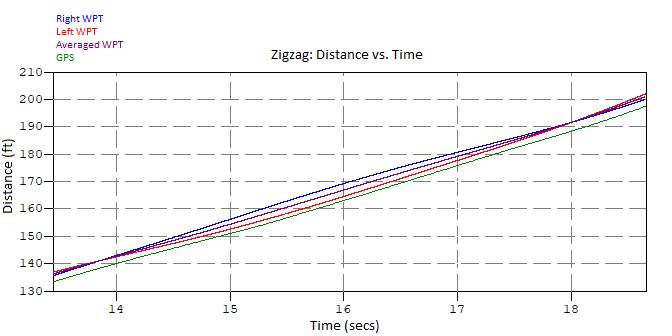
Час між двома точками перетину на графіку нижче – це місце, де відбувалися повороти ліворуч і праворуч. Праве колесо (синє) перевершує ліве колесо (червоне) за пройденою дистанцією, оскільки воно має більший радіус, щоб об’їхати під час лівого повороту, який починається приблизно через 14 секунд і закінчується приблизно через 15.5 секунди. У цей момент праве колесо пройшло далі, ніж ліве. Правий поворот починається трохи раніше, ніж через 17 секунд, а ліве колесо наздоганяє праве до того часу, коли поворот закінчується приблизно через 18 секунд. Середня (фіолетова) пройдена відстань залишається по центру між ними. Оскільки нахил середньої відстані і GPS однакові, вони все ще реєструють ту саму швидкість і зміну відстані. Однак GPS відстає на кілька футів від керма, звідси й невелике зміщення даних.
помилка
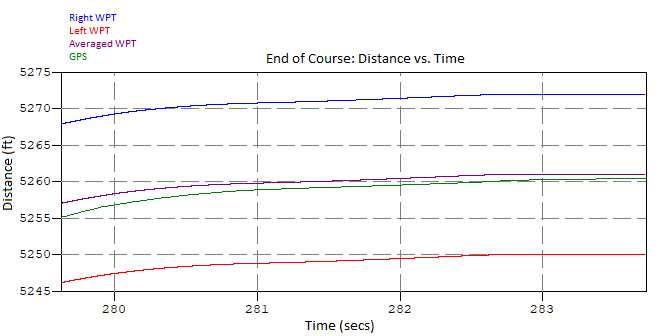
Кілька останніх даних тесту можуть показати переваги використання двох WPT, а не лише одного. Якби використовувався лише один WPT, зареєстровані відстані мали б максимальну похибку 0.22%. Однак, якщо встановити два WPT та усереднювати їх, похибка становить лише 0.0115%, що зменшується в 19 разів. Це показує, що використання двох колісних датчиків імпульсів може допомогти зменшити помилку, яка може накопичуватися протягом кількох обертів.
Цей тест є лише одним із безлічі різних тестів, у яких використовуються колісні датчики імпульсів. Наявність міцної та точної системи вимірювання корисна для точного відстеження положення та швидкості автомобіля в будь-якому середовищі. Якщо ви хочете обговорити свою програму для тестування коліс, зверніться до представника Michigan Scientific сьогодні.